Details

Creating a national dataset of annotated images is a complex task that requires a significant amount of resources and expertise. It's important to have a team with the necessary skills and experience in data collection, annotation, quality control, data management, and distribution. The dataset should be continuously updated and maintained to keep it relevant with the latest environments and conditions.The process typically involves the following steps:




Self-driving cars have the potential to revolutionize the way we think about transportation. They use advanced technologies such as sensors, cameras, and machine learning algorithms to navigate and make decisions on the road. The future of transportation with autonomous vehicles will bring significant changes in terms of safety, efficiency, and convenience.

LIDAR sensor uses lasers to measure the distance to objects and create 3D maps of the vehicle's surroundings

Ultrasonic sensors use sound waves to measure the distance to objects and detect obstacles in the vehicle's path.

Radars emit radio waves to detect the presence, distance, and speed of objects. They can work in all weather conditions.
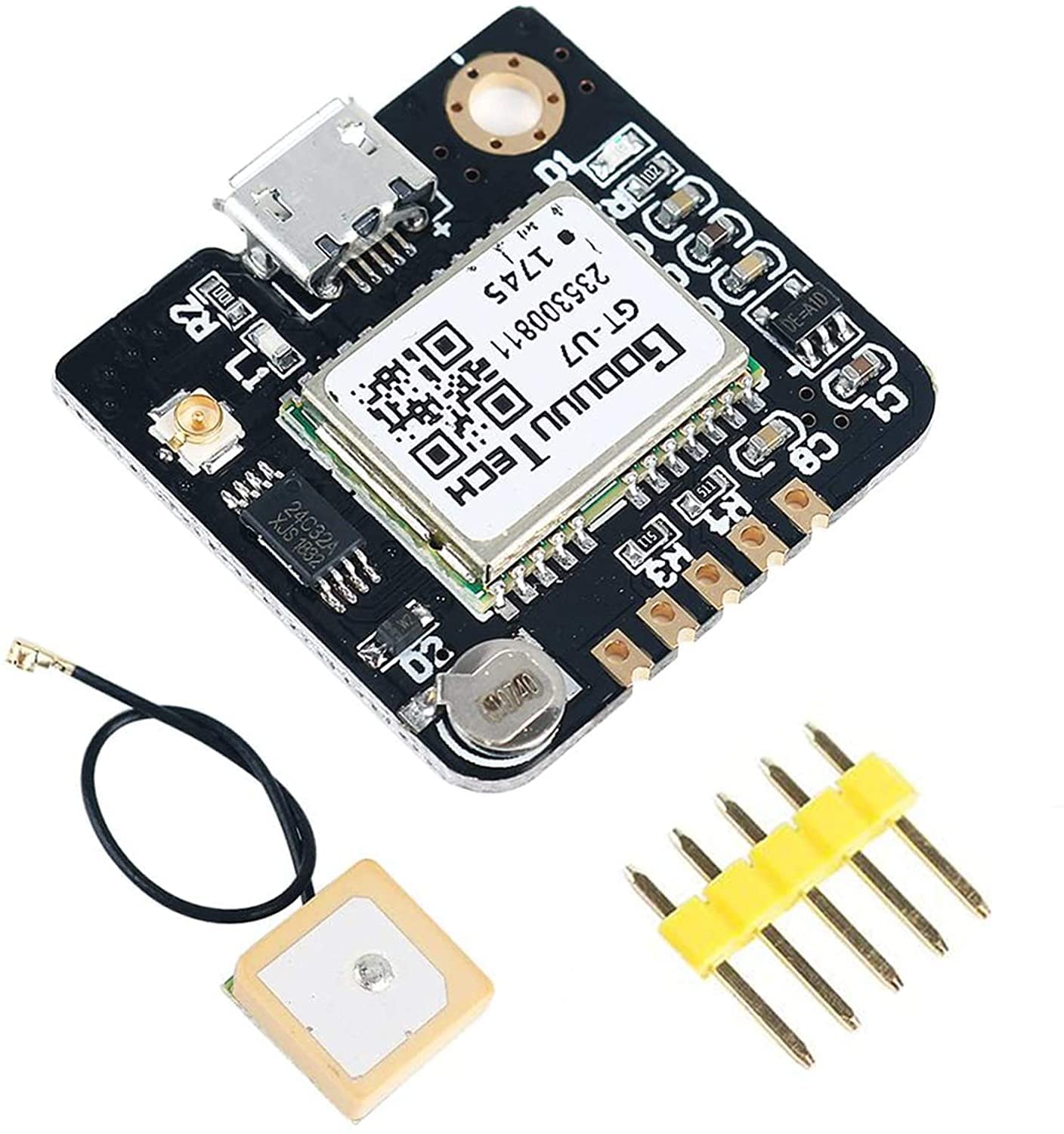
Global Positioning System sensors are used to determine the vehicle's location and navigate.

Inertial Measurement Unit is a device that uses accelerometers and gyroscopes to track the vehicle's orientation and movement.

Wheel encoder sensors are used to track the rotation of the vehicle's wheels and determine its speed and distance travelled.
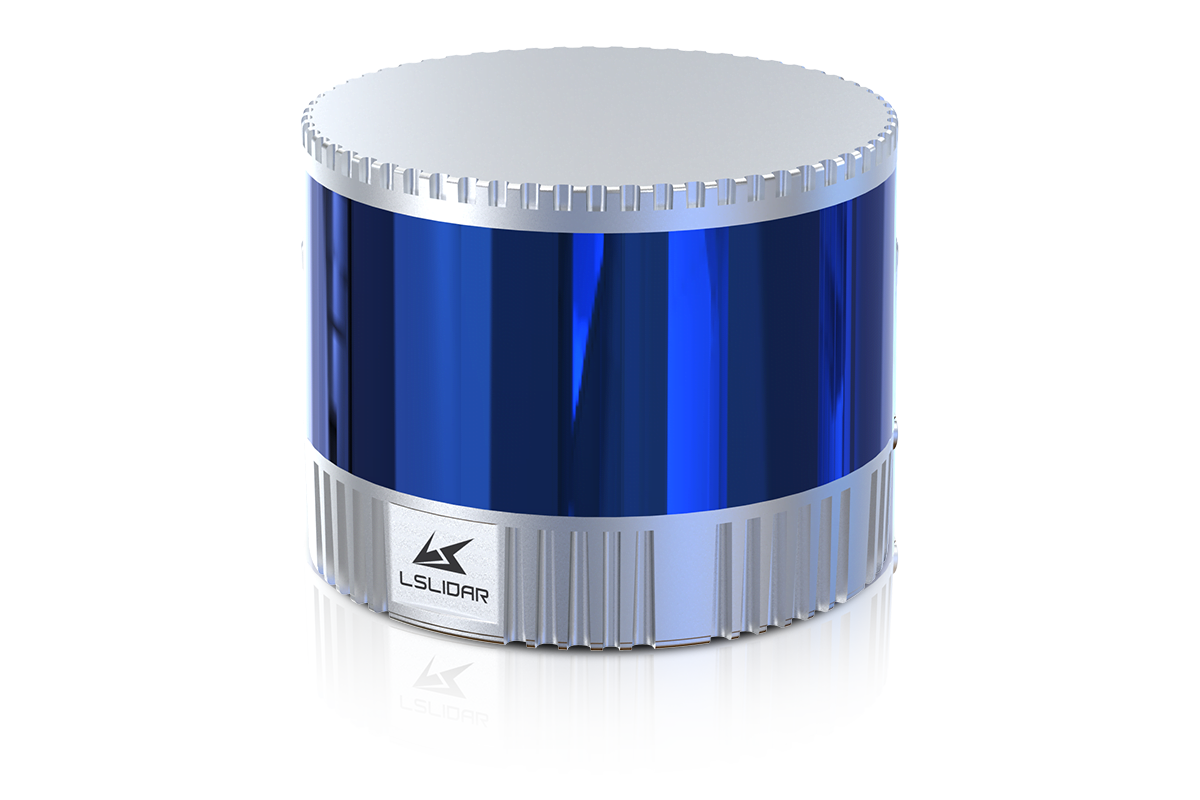




Mechanical LIDAR uses a spinning mirror to scan the environment and create a 3D point cloud. Mechanical LIDAR sensors are highly accurate, but they can be bulky and expensive.
Solid-state LIDAR uses a static mirror and a laser diode to scan the environment. Solid-state LIDAR sensors are smaller, cheaper and more robust than mechanical Lidar sensors, making them more suitable for automotive applications.
Flash LIDAR uses a high-powered laser to illuminate the entire field of view at once, creating a 3D point cloud in a single flash. Flash LIDAR sensors are highly accurate, but they are also very expensive and power-hungry
LIDAR-Camera Fusion uses a combination of LIDAR sensor and cameras to provide both depth and color information. It's a cost-effective solution and also provides high-resolution data
Multi-beam LIDAR uses multiple laser beams to scan the environment, providing a more detailed and accurate 3D point cloud. It's particularly useful for applications such as autonomous vehicles, where high resolution and accuracy are crucial.
A LIDAR sensor typically consists of several main components: a laser, a mirror or lens to direct the laser beam, a detector to capture the reflected laser light, and electronic circuitry to process the data.

FLIR cameras are thermal imaging cameras that are used in autonomous vehicles to capture images of the surrounding environment. These cameras work by detecting and measuring the infrared radiation emitted by objects in the environment, allowing them to detect and capture images even in low-light or night-time conditions.
FLIR cameras are particularly useful in autonomous vehicles because they can detect the heat signatures of other vehicles, pedestrians, and animals, even in complete darkness or heavy fog. This allows the vehicle's computer to detect and avoid potential hazards in the environment, even when the visibility is poor. In addition to detecting potential hazards, FLIR cameras can also be used to help the vehicle navigate by detecting and tracking the heat signatures of road markings and traffic signals.
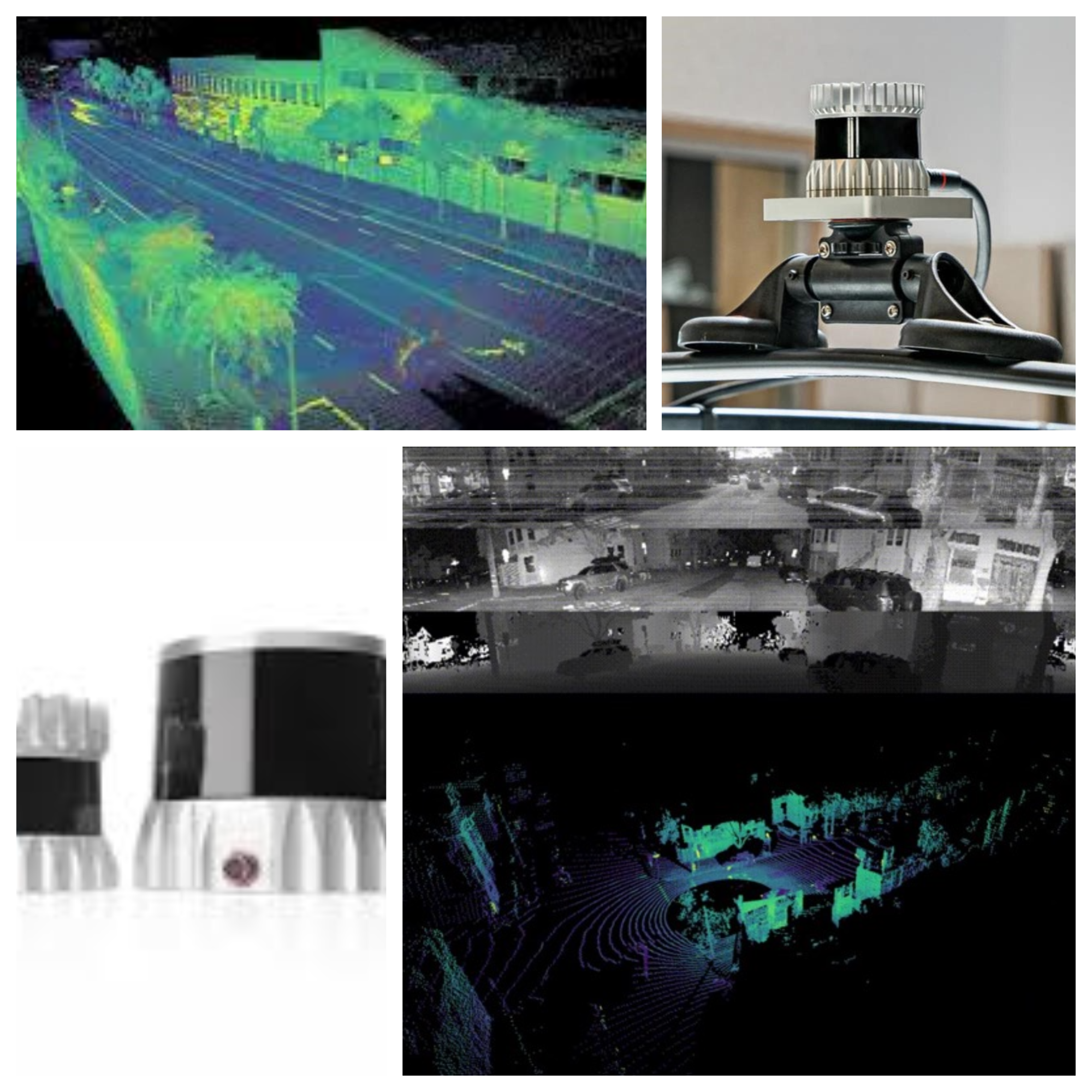
Ouster's lidar sensors are used in a variety of applications, including self-driving vehicles, industrial automation, security, and mapping. The company's products are known for their high accuracy, long range, and ability to operate in challenging environments. Ouster Lidar is a provider of high-resolution, solid-state lidar sensors for applications including self-driving vehicles, industrial automation, security, and mapping
Their 16-channel sensors offer high density point cloud data, with a field of view of 360 degrees and a maximum range of up to 130 meters. The sensors utilize micro-electromechanical (MEMS) technology, and offer reliable operation in challenging environments. They also have a low power consumption and compact form factor, making them well suited for integration into a wide range of systems. Ouster Lidar's sensors use a spinning mechanism to emit laser beams in a 360-degree field of view. This allows them to capture a full, detailed 3D map of the environment in a single sweep. Ouster sensors are also known for their high resolution and accuracy